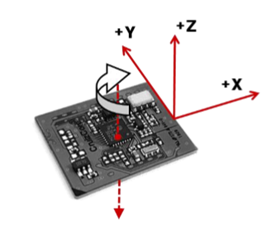
The ROS imu device is a digtal gyroscope and accelerometer device that publishes the data using ROS topic and ROS messages. It is used for measuring angular rates, heading angle (also known as orientation or yaw) and accelerations under dynamic conditions.
ROS message file: sensor_msgs/Imu.msg
ROS message definition
std_msgs/Header header geometry_msgs/Quaternion orientation float64[9] orientation_covariance geometry_msgs/Vector3 angular_velocity float64[9] angular_velocity_covariance geometry_msgs/Vector3 linear_acceleration float64[9] linear_acceleration_covariance

he ROS Lidar can perform 2D 360-degree scan within a 12-meter range. The generated 2D point cloud data can be used in mapping, localization and object/environment modeling.
ROS message file: sensor_msgs/LaserScan.msg
ROS message definition
std_msgs/Header header float32 angle_min float32 angle_max float32 angle_increment float32 time_increment float32 scan_time float32 range_min float32 range_max float32[] ranges float32[] intensities

The ROS motor aggregates all ROS packages that allow interfacing with a motor controller or servo controller.
ROS message file: std_msgs/Int16.msg
ROS message definition
int16.data
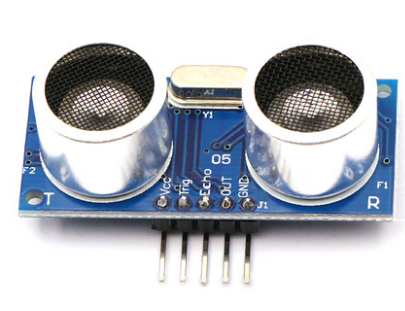
The ROS Ulstrasonic can provide 2cm-450cm non-Contact distance sensing function, ranging accuracy can reach 3mm. Including ultrasonic transmitter, receiver and control circuit
ROS message file: std_msgs/Int16.msg
ROS message definition
int16.data

The ROS Temperature device is a digital temperature sensor ideal for NTC/PTC thermistor replacement where high accuracy is required.
ROS message file: sensor_msgs/Temperature.msg
ROS message definition
std_msgs/Header header float64 temperature float64 variance
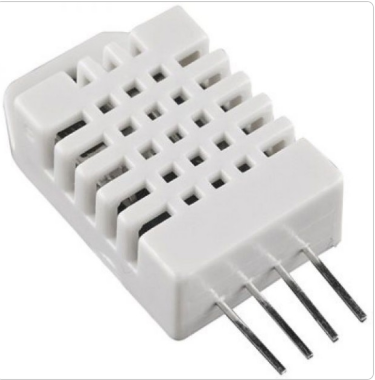
The ROS Humidity and Temperature device can be used as external sensors (environmental sensors) or as internal sensors to the robot.
ROS message file (Temperature): sensor_msgs/Temperature.msg
ROS message file (humidity): sensor_msgs/RelativeHumidity.msg
ROS message definition(humidity) std_msgs/Header header float64 relative_humidity float64 variance ROS message definition (temperature) std_msgs/Header header float64 temperature float64 variance

The ROS camera provides image data to the robot that can be used for object identification, tracking and manipulation tasks. This portal currently contains both monocular and stereo cameras.
ROS message file: sensor_msgs/Image.msg
ROS message definition std_msgs/Header header uint32 height uint32 width string encoding uint8 is_bigendian uint32 step uint8[] data

The ROS Speaker can receive a string and talk.
ROS message file: std_msgs/String.msg
ROS message definition string data

ROS lights can be controlled to be turned on or off. Can be adjusted for power, brightness and color temperature.
ROS message file: std_msgs/Int16.msg
ROS message definition int16.data

The ROS weight sensor with small size and low height. All stainless steel, corrosion resistant. Suitable for occasions where space is limited.
ROS message file: std_msgs/Int16.msg
ROS message definition int16.data