ROS IMU
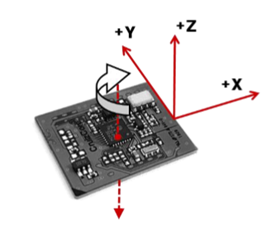
The ROS imu device is a digtal gyroscope and accelerometer device that publishes the data using ROS topic and ROS messages. It is used for measuring angular rates, heading angle (also known as orientation or yaw) and accelerations under dynamic conditions.
ROS message file: sensor_msgs/Imu.msg
ROS message definition
std_msgs/Header header geometry_msgs/Quaternion orientation float64[9] orientation_covariance geometry_msgs/Vector3 angular_velocity float64[9] angular_velocity_covariance geometry_msgs/Vector3 linear_acceleration float64[9] linear_acceleration_covariance
ROS IMU
The ROS imu device is a digtal gyroscope and accelerometer device that publishes the data using ROS topic and ROS messages. It is used for measuring angular rates, heading angle (also known as orientation or yaw) and accelerations under dynamic conditions.
ROS message file: sensor_msgs/Imu.msg
ROS message definition
std_msgs/Header header geometry_msgs/Quaternion orientation float64[9] orientation_covariance geometry_msgs/Vector3 angular_velocity float64[9] angular_velocity_covariance geometry_msgs/Vector3 linear_acceleration float64[9] linear_acceleration_covariance